|
|
Optical Flow and Electroreception for Underwater Motion Coordination and Homing Sponsor: ONR (Tom McKenna)
In this project we investigate the opportunity to apply bio-inspired sensor processing (Humbert) and data-fusion methods (Paley) to the problem of low-cost absolute and relative navigation for multi-vehicle search/surveillance and mine neutralization. Two wide-field sensing modalities, optic flow and electroreception, will be evaluated for the purpose of identification of potential targets, both for homing and relative navigation applications. A probabilistic approach to underwater localization with optical and electrical sensing will be implemented to assimilate sequential observations into an onboard, model-based framework.
|
J. Sean Humbert, Ph.D. |
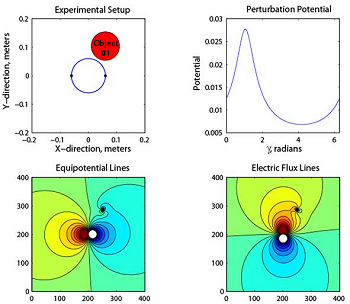 Viable strategies for extracting and fusing uncertain observations of the underwater environment are exemplified by biological systems that use optical and electrical sensing. Electrolocation is the technique that is used by certain species of weakly electric fish for the purpose of target detection, obstacle avoidance and prey capture. These fish are capable of sensing subtle perturbations to a self-generated weak electric field to extract features of local objects, such as distance, size, and shape. Invertebrates, on the other hand, are masters at decomposing patterns of motion vision (optic flow) into relative proximity and speed of surrounding objects in the environment.
Viable strategies for extracting and fusing uncertain observations of the underwater environment are exemplified by biological systems that use optical and electrical sensing. Electrolocation is the technique that is used by certain species of weakly electric fish for the purpose of target detection, obstacle avoidance and prey capture. These fish are capable of sensing subtle perturbations to a self-generated weak electric field to extract features of local objects, such as distance, size, and shape. Invertebrates, on the other hand, are masters at decomposing patterns of motion vision (optic flow) into relative proximity and speed of surrounding objects in the environment. 
©2010 University of Maryland