|
ARO Young Investigator – Insect-Inspired Visual Flight Control for Aerial Microsystems Sponsor: ARO (Randy Zachary)
Over the past 5 years there has been significant research investment and progress in actuation and fabrication technology for micro-scale systems. Sensors, processing, and feedback control architectures, on the other hand, are dramatically behind the curve at these scales. This is particularly true for flying microrobotics, where the challenges due to the high bandwidth dynamics and stringent size, weight, and power constraints render traditional technology and paradigms unusable. Novel sensors and sensory processing architectures that enable stable flight control, obstacle avoidance, and detection of external stimuli will need to be developed if autonomous microsystems are to ultimately be realized.
|
J. Sean Humbert, Ph.D. |
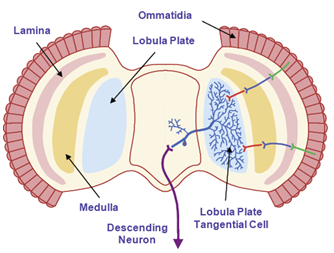 Insect nervous systems, which function under similar constraints, offer a promising alternative. In these small organisms, spatially distributed arrays of simple sensors that collect localized measurements are pooled and processed in parallel by sensory interneurons that converge onto relatively small numbers of motor neurons responsible for controlling locomotion. This simple, yet elegant architecture is employed by numerous species to achieve a wide range of behavioral tasks. The objective of the proposed research is to formalize these wide-field processing principles of the insect visuomotor system for an intended audience of microsystem roboticists, engineers, and designers. The outcome will enable substantial improvement in the capabilities of autonomous engineered systems for situational awareness in urban and confined environments.
Insect nervous systems, which function under similar constraints, offer a promising alternative. In these small organisms, spatially distributed arrays of simple sensors that collect localized measurements are pooled and processed in parallel by sensory interneurons that converge onto relatively small numbers of motor neurons responsible for controlling locomotion. This simple, yet elegant architecture is employed by numerous species to achieve a wide range of behavioral tasks. The objective of the proposed research is to formalize these wide-field processing principles of the insect visuomotor system for an intended audience of microsystem roboticists, engineers, and designers. The outcome will enable substantial improvement in the capabilities of autonomous engineered systems for situational awareness in urban and confined environments.
©2010 University of Maryland