|
Sponsor: ARL (Joseph Mait)
Collaborators: Paul Samuel (Daedalus Flight Systems), Inder Chopra
(UMD), Michael Dickinson (Caltech),
J. Gordon Leishman (UMD), Jim Baeder (UMD)
While research over the last 10 years has provided critical insight into the aerodynamic
basis of insect flight, formalization of the underlying principles for transition to
engineered systems is significantly lacking. Our research objective for this project is threefold:
- leverage tools from system identification and dynamical systems theory to generate
a rigorous formulation of reduced order flight dynamics about hover and maneuvering flight
- use these results to characterize the sensing and feedback requirements; and
- provide a comprehensive methodology and set of feedback control principles for the use
of unsteady aerodynamics on oscillating appendages to generate both lift and maneuvering
forces that achieve robust flight stabilization of small autonomous flying platforms.
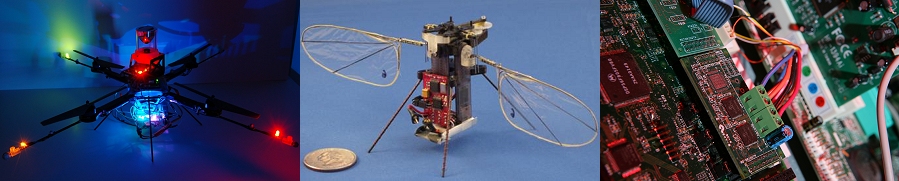
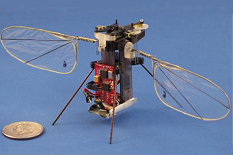
Vehicle development for the project (top left) being done in collaboration with
Daedalus Flight Systems (Dr. Paul Samuel).
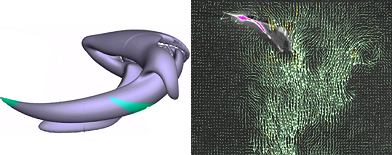
Double-click on the images below
to start the movies >>
 QuickTime format. File
size is 1MB.
Quicktime Player required for viewing. QuickTime format. File
size is 1MB.
Quicktime Player required for viewing.
You can download a free player HERE.
Double-click on the image on the right
to start the movie >>
QuickTime format.
File size is 1MB.
Quicktime Player required for viewing.
You can download a free player HERE.
|
|
|

J. Sean Humbert, Ph.D.
Techno-Sciences Associate Professor of Aerospace Engineering Innovation
3182 Glenn L. Martin Hall
University of Maryland
College Park, MD 20742
301.405.0328 TEL
301.314.9001 FAX
humbert (at) umd.edu
|