|
Sponser: MURI (ARO)
Collaborators: Dean Darryll Pines (PI), Evan Ulrich, Sean Humbert
 This dissertation details the flight dynamics and control of a prototype mono-wing rotorcraft which mimics the passive transit of the species Acer diabolicum Blume. The asymmetric and all-rotating platform requires the development of a novel sensing and control framework. The rigid body dynamics are derived for a flight path consisting of a coordinated helical turn. The small perturbation equations of motion are used to calculate the forces necessary for flight along a trajectory recorded by a visual motion capture system. The result of this work is that the robotic samara is controllable in unpowered autorotation as well as hovering and directional flight. This dissertation details the flight dynamics and control of a prototype mono-wing rotorcraft which mimics the passive transit of the species Acer diabolicum Blume. The asymmetric and all-rotating platform requires the development of a novel sensing and control framework. The rigid body dynamics are derived for a flight path consisting of a coordinated helical turn. The small perturbation equations of motion are used to calculate the forces necessary for flight along a trajectory recorded by a visual motion capture system. The result of this work is that the robotic samara is controllable in unpowered autorotation as well as hovering and directional flight.
Double-click on the image on the right
to start the movie >>
 QuickTime format. File
size is 9.2MB. QuickTime format. File
size is 9.2MB.
Quicktime Player required for viewing.
You can download a free player HERE.
|
|
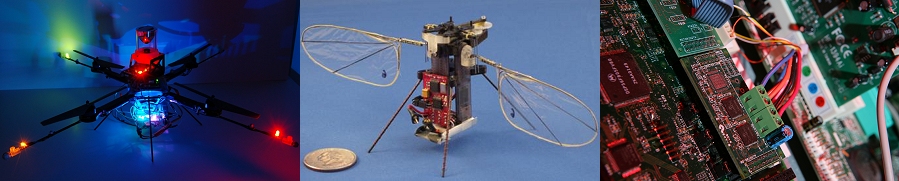
 Micro/Nano Unmanned Aerial Systems (UAS) are an emerging class of vehicles uniquely suited to performing covert missions. Autonomy is an essential aspect of the intended function of UAS, and development of a dynamic model will enable control and state estimation algorithm synthesis. To that end, a linear model for the heave dynamics of a mechanical samara (winged seed) in hovering flight was identified from data collected external to the vehicle by a visual tracking system. Identification and error estimation efforts utilized a frequency response-based system identification. The two mechanical samara vehicles of different scale compared in this study represent the first demonstration of controlled flight of a vehicle of this kind. Micro/Nano Unmanned Aerial Systems (UAS) are an emerging class of vehicles uniquely suited to performing covert missions. Autonomy is an essential aspect of the intended function of UAS, and development of a dynamic model will enable control and state estimation algorithm synthesis. To that end, a linear model for the heave dynamics of a mechanical samara (winged seed) in hovering flight was identified from data collected external to the vehicle by a visual tracking system. Identification and error estimation efforts utilized a frequency response-based system identification. The two mechanical samara vehicles of different scale compared in this study represent the first demonstration of controlled flight of a vehicle of this kind.
The paper that covers this can be found HERE. (pdf)
Double-click on the image on the right
to start the movie >>
QuickTime format. File
size is 2MB.
Quicktime Player required for viewing.
You can download a free player HERE.
|
|
Sponser: MURI (ARO)
Collaborators: Dean Darryll Pines (PI), Evan Ulrich, Sean Humbert
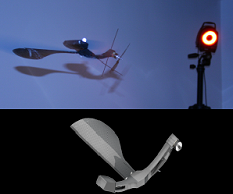 This work details the flight dynamics and control of a prototype mono-wing rotorcraft which mimics the passive transit of the species of samara (winged seed), Acer diabolicum Blume. The asymmetric and all-rotating platform requires the development of a novel sensing and control framework. The rigid body dynamics are derived for a flight path consisting of a coordinated helical turn. The equations of motion are used to calculate the forces necessary for flight along a tra jectory recorded by a visual motion capture system. The result is a framework for state estimation and control applicable to scaled versions of the robotic samara. This work details the flight dynamics and control of a prototype mono-wing rotorcraft which mimics the passive transit of the species of samara (winged seed), Acer diabolicum Blume. The asymmetric and all-rotating platform requires the development of a novel sensing and control framework. The rigid body dynamics are derived for a flight path consisting of a coordinated helical turn. The equations of motion are used to calculate the forces necessary for flight along a tra jectory recorded by a visual motion capture system. The result is a framework for state estimation and control applicable to scaled versions of the robotic samara.
Double-click on the image on the right
to start the movie >>
QuickTime format. File
size is 6.4MB.
Quicktime Player required for viewing.
You can download a free player HERE.
|
|
|
YouTube Videos:
• The Ulrich Flyer
Download Papers:
• AHS65.pdf
• AHS64.pdf
(This paper is have been accepted to the Journal of the American Helicopter
Society)
• sysid-AIAA.pdf
(This paper has be submitted to AIAA Journal of Aircraft, and is currently under
review)
more information...
|